A look behind the scene of a self-built gadget.


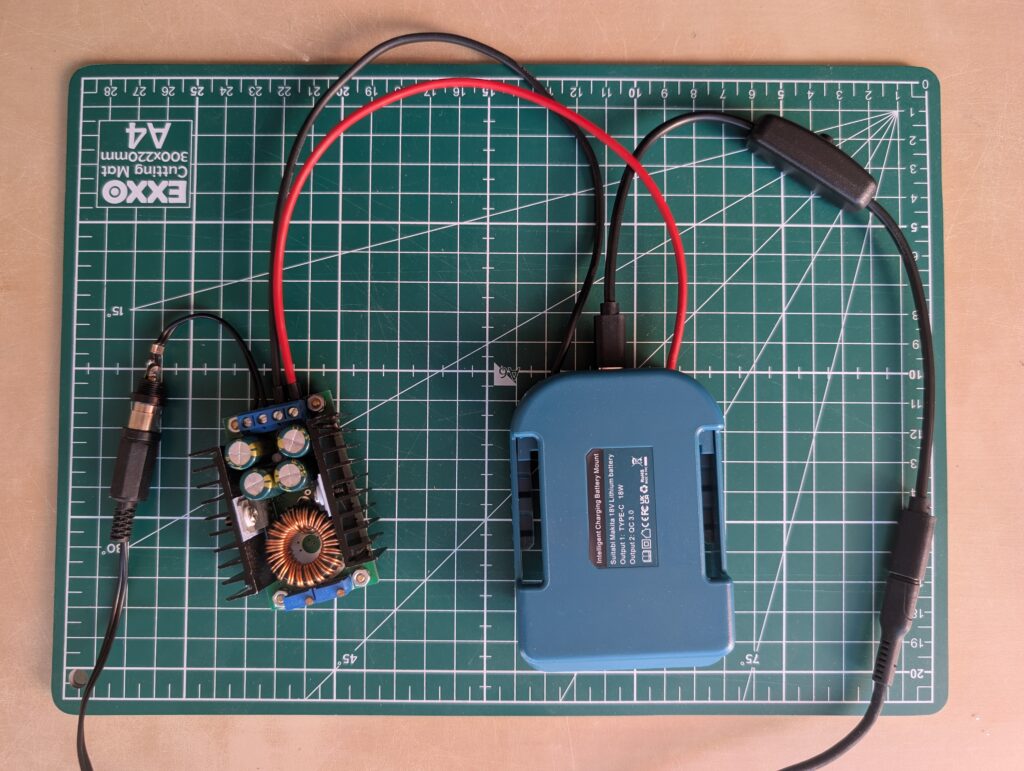
A Makita USB-C batteryholder and a Buck converter to go from 18-ish volt to a stable enough 5.0 volt for powering LEDs.
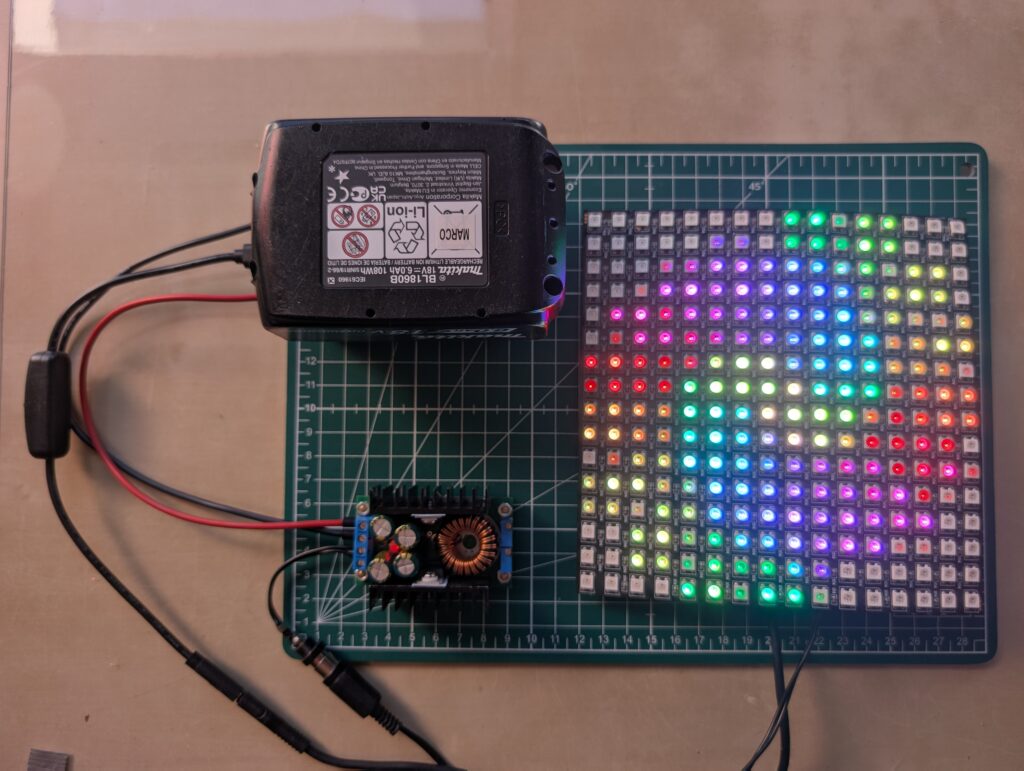
Connect that to a flexible LED array (Just a different form factor of a LED strip)
Duct tape, can “fix” everything WD-40 cannot.
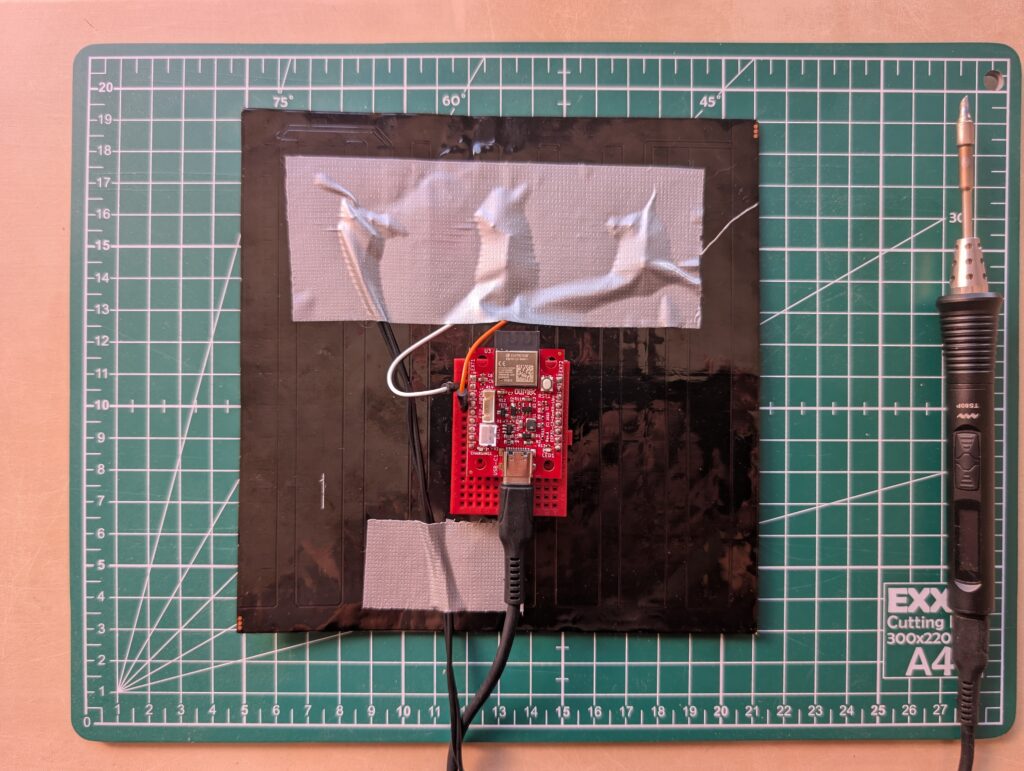
More Duct tape is better.

WLED takes care of animating whatever you want on the display. WLED is running on a ESP-32 USB-C.